Chapter 6. Command line interface
6.1 Introduction
You can connect to the internal software of the DM24 over its output serial port and communicate with it.
To enter command mode from Scream!, right-click on the digitiser's icon ( ) and select Terminal… from the menu that pops up. A window will open, and once the digitiser and computer are communicating properly you will see the prompt
) and select Terminal… from the menu that pops up. A window will open, and once the digitiser and computer are communicating properly you will see the prompt
ok
If you prefer, you can use a terminal program on your computer (such as minicom on Linux, or PuTTY on Microsoft Windows) to connect to the DM24.
Whilst you are in terminal mode, data transfer will be interrupted; the digitiser may use any Flash memory as a temporary store, depending on how you have configured it. Some commands, such as SET-TAPS, require a reboot to take effect.
When you are finished with your command-line session, simply close the Scream! or emulator window. Scream! will automatically issue the GO command to resume data-stream transmission. The session will, in any case, time-out after a minute. If this happens while you are using minicom or PuTTY, and the digitiser starts transmitting stream data (which will appear as bursts of unintelligible characters), key  +
+ to interrupt the streams and resume your session.
to interrupt the streams and resume your session.
Güralp EAM modules also allow you to send commands direct to the digitiser using the command-line tool data-terminal. Older DCMs and AMs used the command-line tool gcli. For more information, please see the manual for your data module.
If you have problems connecting to the digitiser's console, you should check that the serial port's options and baud rate are set correctly in Scream! or your terminal program. As supplied, the DM24 expects connections at 19200 baud, with eight data bits, no parity bit and one stop bit. No flow control is used: neither hardware nor software.
6.1.1 FORTH
The DM24 uses a FORTH interpreter to implement its features. To issue a command in FORTH, you must supply the arguments before the command, for example:
3 SENSOR-TYPE
In FORTH, anything you enter is termed a word. New words (case insensitive) are placed on a stack. Some words are known to the system, and may represent commands; if a command finds itself at the top of the stack (e.g. because it is the last thing you typed), they will execute, remove themselves from the stack, and then remove further items from the stack to use as arguments. Thus, in the command
3 SENSOR-TYPE
the 3 has no immediate effect, so stays on the stack; SENSOR-TYPE takes itself and the previous item (here 3) off the stack, then performs its action on the 3 (here, setting the configured sensor type to 3, representing a Güralp 3T sensor).
If a command completes with nothing remaining on the stack, the digitiser will show the prompt ok. Otherwise, the prompt will remind you that the digitiser is waiting for you to complete the command. Some commands, such as SAMPLES/SEC, clear the stack automatically after they execute.
Throughout this manual, examples are given of command-line interactions. In these examples, a fixed-width typeface will be used:
Example of the fixed-width typeface used.
Commands that you are required to type will be shown in bold:
Example of the fixed-width, bold typeface.
Some commands are interactive, and will ask you to provide extra information after you execute them. Where data that you type may vary depending on your individual configuration, such as parameters to commands, these are shown in italics:
Example of the fixed-width, bold, italic typeface.
Putting these together into a single example:
System prompt: variable parameters command
6.2 Getting help
The DM24 has an on-board help system which can be accessed with the commands HELP and EXPLAIN.
6.2.1 HELP
Syntax: HELP
Lists all the commands which are recognized by the digitiser.
If the command you want is not listed:
The command may be in the extended dictionary. This dictionary contains certain advanced commands, as well as exposing internal digitiser functions and variables. To enable the extended dictionary, issue the command ok-1 (that's a number one, not a lower-case 'L').
When you have finished using the extended dictionary, close it with the command [seal] (including the square brackets), so you do not inadvertently change the internal settings with subsequent commands.
Alternatively, the command may not be implemented in the firmware version you have installed. Check the Güralp Systems web site for updated firmware.
6.2.2 EXPLAIN
Syntax: EXPLAIN command
Displays a short message describing the syntax of command and its effect.
6.3 General configuration
6.3.1 SET-ID
Syntax: SET-ID (interactive)
Sets the system identifier and serial number of the DM24 to values you supply.
SET-ID
System Identifier ? {ALPHA} DM24,
Serial # ? (C23300) C902,00
DM24 C90200 CMG-3T ok_C902
The system identifier you supply may contain up to 5 alphanumeric (0-9A-Z) characters and should be followed by a comma (‘,’), which is not treated as part of the serial number. The system identifier can not start with a zero (’0’) character.
The serial number you supply must contain exactly 4 alphanumeric (0-9A-Z) characters followed by a comma and two zeroes (0) in almost all circumstances. The first four characters are copied verbatim into stream IDs and the final two characters are used as the “base” for generating stream identifiers. All stream IDs used in this manual assume that these two characters are zeros. The serial number can not start with a zero (’0’) character.
The system responds by printing the new system identifier and serial number, the sensor type and the “ok” prompt (which is now derived from the new serial number). If the sensor type has not been set, the word NOTSET is printed in its place.
6.3.2 SERIAL2
Syntax: SERIAL2 (interactive)
Sets the serial number for a second sensor (for seven-channel digitisers) to a value you supply.
SERIAL2
Secondary Serial # {0} ? 6 characters : C903,00
The serial number you supply must contain exactly four alphanumeric (0-9A-Z) characters followed by a comma and two zeros (which are ignored - see the discussion of serial numbers at SET-ID, above).
6.3.3 RESETLABELS
Syntax: RESETLABELS
Clears any second serial-number and resets any custom stream labels so that, for example, the first tap of the vertical component of the first sensor ends Z0 and the first tap of the vertical component of the second sensor ends Z1.
6.3.4 SENSOR-TYPE
Syntax: type SENSOR-TYPE
Tells the DM24 which kind of sensor is attached to it. This affects whether or not the digitiser exposes commands such as locking and centring.
type can be one of
1, for 40T sensors,
2, for 3ESP sensors,
3, for 3T analogue sensors, or
4, for 3TD sensors.
6.3.5 AZIMUTH
Syntax: instrument angle AZIMUTH
Some borehole digitisers can rotate incoming signals algorithmically as they are digitized. This feature allows you to compensate for an instrument being out of alignment with the North/South axis. To use it, first measure the orientation of the sensor, then connect to the digitiser and issue an AZIMUTH command, giving the angle you have measured.
instrument tells the digitiser which instrument to apply the rotation to; 0 for sensor A or 1 for sensor B.
angle is the measured angle of deviation from the North/South axis, in tenths of a degree. The angle of deviation is the negative of the angle by which you want incoming signals to be rotated. Like all other parameters, it must be an integer (i.e. a whole number of tenths of a degree).
You can measure the orientation of a borehole sensor by placing a reference sensor nearby and carrying out coherence calculations. An extension to Scream! is available which can do this for you. For details, see the manual for your sensor or for Scream!.
The AZIMUTH command only alters the digitiser's CMOS settings. You will need to re-boot the digitiser to transfer them to the DSP.
6.3.6 CROSS
Syntax: channel CROSS
Alters the DSP's transformation matrix to invert one of the digitiser channels. channel is one of 0 (vertical), 1 (N/S), 2 (E/W) and 3 (auxiliary).
The CROSS command only alters the digitiser's CMOS settings. You will need to re-boot the digitiser to transfer them to the DSP.
Note: If you need to set both AZIMUTH and CROSS, you must issue AZIMUTH first, since it overwrites the matrix.
6.4 GPS, GNSS and timing
6.4.1 GPS-TYPE
Syntax: type GPS-TYPE
Tells the DM24 which kind of GNSS receiver is attached to it.
type can be one of
0, if no receiver is available, or
2, for attached GNSS receivers using the NMEA protocol at 4800 Baud
4, for attached GPS equipment using the NMEA protocol at a different Baud-rate. This is required for GLONASS-capable receivers which need to operate at 38,400 Baud in order to accommodate all of the NMEA sentences which need to be transmitted within each second. The Baud rate must be set manually using the BAUD command in this case.
6.4.2 HR-CYCLE
Syntax: interval HR-CYCLE
Sets the time to wait between GPS synchronizations.
To save power, the DM24 can switch off the attached GPS receiver once its internal precision clock has been successfully synchronized. The GPS receiver is reactivated every interval hours to ensure that the clock remains correct, and shut down again once the clock error has stabilized.
Setting interval to zero disables this function, i.e. the GPS will be powered all the time. This is the best setting to use in installations with access to mains (outlet) power. The maximum allowed value for interval is 23.
6.4.3 SET-CLOCK
Syntax: SET-CLOCK (interactive)
The DM24 has two clocks: a hardware real-time clock (RTC), which runs continuously (even when the unit is powered down) and a software clock that is used for time-stamping digitised data. The software clock is set from the RTC at boot-up: this is the only time that the system consults the RTC. Both clocks are set whenever the DM24 synchronises to GPS time.
The SET-CLOCK command sets the RTC. It does not affect the software clock.
SET-CLOCK
Enter Date & Time -
YYYY MM DD HH MM SS
2006 02 01 12 53 25 Clock set to 2006 2 1 12:53:27 ok_SBHY
The time should be entered in the form year month day hour minute second, padding each field with zeroes so that they line up with the guide above.
If the DM24 does not recognize the time format you have used, it will output the message:
Invalid Time Entry.
The RTC time can be copied to the software clock by rebooting the system.
This setting will be overridden when the GPS system next synchronizes the clocks.
6.4.4 TIME?
Syntax: TIME?
Displays the current date and time from the software clock that is used to time-stamp digitised data. See SET-CLOCK for more details.
6.4.5 getWNROpivot
Syntax: getWNROpivot
Prints the configured GPS week-number roll-over pivot date. See setWNROpivot, below, for more details.
6.4.6 setWNROpivot
Syntax: YYYY MM DD setWNROpivot
This command sets the "pivot date" which will be used for any required GPS week-number roll-over (WNRO) corrections, where:
YYYY specifies the four-digit year;
MM specifies the month, with 01 representing January and 12 representing December; and
DD specifies the day of the month.
If an attached GPS receiver reports that the current date is earlier than the pivot date specified with this command, the digitiser will assume that the receiver is affected by the WNRO problem. The digitiser will add one or more multiples of 1024 weeks to the reported date until the result is later than the specified pivot date. This modified date is then used for time-stamping data. See section 7.2.3 for more details.
For best results, specify a date in the very recent past and repeat every nineteen years.
6.4.7 LEAPSECOND
Syntax: yyyy mm dd LEAPSECOND
Manually notify the digitiser of an upcoming leap second. This command serves two purposes.
When a positive leap-second occurs, the GPS receiver will signal this fact by sending the special time 23:59:60. The digitiser recognises this and all data will be time-stamped appropriately. If for any reason, the digitiser does not receive this time - the system may, for example, be configured for GPS power-cycling and the receiver may be powered down - the digitiser will produce data with incorrect time-stamps until it can resynchronise to the GPS receiver again. If the digitiser is notified in advance about an upcoming leap-second, this situation can be avoided and the leap-second will be handled correctly even if GPS data are unavailable at the time.
In addition, some older GPS receivers - those based on Trimble Lassen SQ modules - were supplied with a firmware revision that did not properly implement leap-seconds. See SQPATCH, below.
Note: The leap second is taken to be at the end of the day yyyy-mm-dd.
6.4.8 SQPATCH
Syntax: SQPATCH ENABLE or SQPATCH DISABLE
Enables or disables the internal patch for older GPS receivers based on Trimble Lassen SQ units with faulty firmware. These units misinterpreted the GPS system's advance notification of a leap second and, consequently, reported times which were one second out during the period between the leap second announcement and the actual leap second itself.
With SQPATCH enabled, the time reported by the digitiser is offset by 1 second to counteract this problem. If you have set LEAPSECOND, above, SQPATCH will automatically be disabled when the leap second occurs and the digitiser will then run normally. GPS receivers with the latest firmware do not suffer from this problem.
To find out whether SQPATCH is currently enabled, issue the command
.SQPATCH
6.5 Port configuration
6.5.1 BAUD
Syntax: port baud-rate BAUD
Sets the baud rate for one of the serial ports on the DM24, in bytes per second. port can be:
0, for the DATA OUT port;
1, for the GPS port; or
2, for the DATA IN port.
For example,
0 38400 BAUD
1 4800 BAUD
2 38400 BAUD
This will reset a standard single-sensor DM24 to its default configuration.
The allowable values for baud-rate are 4800, 7200, 9600, 14400, 19200, 38400, 57600, 115200 and 230400. For compatibility reasons, 1152 is also accepted, setting the baud rate to 115200.
Note: The GPS port (port 1) should always be set to 4800 baud unless a GLONASS-compatible receiver is being used.
6.5.2 STOPBITS
Syntax: port number-bits STOPBITS
Sets the number of stop bits used for one of the serial ports on the DM24. port can be:
0, for the DATA OUT port;
1, for the GPS port; or
2, for the DATA IN port.
By default, the DM24 uses one stop bit on all ports.
Note: This command has no effect on MkⅢ DM24s, which always use one stop-bit.
6.5.3 +MODEM
Syntax: +MODEM (interactive)
Instructs the DM24 to use a modem connected to the DATA OUT port to contact a remote device and transmit data stored in the Flash memory.
The DM24 can dial out every time it generates a heartbeat message, and also whenever a trigger occurs. You can change the interval between heartbeat messages with the HEARTBEAT command, below.
When you issue +MODEM for the first time, the digitiser will prompt you to enter a telephone number:
+MODEM
Phone# is not set Enter phone# 00441189819056
Phone# 00441189819056 Flash FIFO : Circular Configuration for dial out ok_DEMO00
If you have already configured a telephone number, the command will print out the current setting and ask if you want to change it.
+MODEM
Phone# 00441189819056 New number? y/n y
Enter phone# 00441189819943
Phone# 00441189819943 Flash FIFO : Circular Configuration for dial out ok_DEMO00
+MODEM also changes the transmission mode of the digitiser to FILING, so that all incoming data are stored in Flash memory, ready to be downloaded. When the dial-out takes place, all new data in Flash memory are transmitted. By configuring the DM24 to transmit only triggered streams, you can create a system which “wakes up” on a trigger, connects to a data centre using the modem, and delivers the triggered data in near real time.
6.5.4 –MODEM
Syntax: -MODEM
Disables automatic modem dial-out. Note that this command does not change the current transmission mode so, if you have previously issued +MODEM, the DM24 will be left in FILING mode.
If you issue -MODEM over a dial-out modem link, you should make sure you have arrangements already in place for contacting the DM24 by other means, since the command will cause the connection to close.
6.5.5 +GCFIN
Syntax: input-port +GCFIN
Instructs the digitiser to accept GCF input on either the GPS or the DATA IN port. input-port can be:
1, for the GPS port; or
2, for the DATA IN port.
The GCF streams received will be combined with the DM24's own streams and output with them through the DATA OUT port or saved to Flash memory, according to the current transmission mode.
Whilst GCF input is active, the normal function of each port (GPS or console access) is disabled.
6.5.6 –GCFIN
Syntax: input-port -GCFIN
Instructs the digitiser to stop accepting GCF input on input-port, and to return the port to normal operation.
6.5.7 OPEN
Syntax: OPEN system-id stream-id-prefix (n.b.)
Opens a terminal session to a second, connected digitiser.
The DM24 scans all the ports which are currently accepting GCF input (see +GCFIN, above) to find a digitiser which matches system-id and stream-id-prefix.
For stream-id-prefix you should use the first 4 characters of the Stream IDs produced by the required digitiser, i.e. without the component and tap designations.
A terminal connection is then made to the second digitiser, allowing you to issue commands.
To finish the session and return to the first digitiser's terminal mode, use the command GO.
6.5.8 USBPORT
Note: This command is only available on units with the optional USB interface.
Syntax: port USBPORT
Instructs the digitiser to redirect input or output from port port to the USB interface. You can then attach the USB port to your computer with a suitable cable, where it will appear as an additional serial port with a significantly faster data transfer rate. The value for port can be:
0, for the DATA OUT port;
1, for the GPS port; or
2, for the DATA IN port.
The USB interface is provided by an internal FTDI245 chip, which is compatible with Microsoft Windows, Linux and Apple Macintosh systems.
You can use the USB port only to connect to a computer, not directly to a peripheral (e.g. a hard disk). If you want to download data to a hard disk, you should specify the FireWire interface instead.
6.6 Output configuration
6.6.1 SAMPLES/SEC
Syntax: tap-0 tap-1 tap-2 tap-3 samples/sec
The DSP software on the DM24 supports up to 7 cascaded filter/decimation stages. At each stage, the sample rate can be divided by a factor of 2, 4 or 5. The internal ADC outputs data at 2000 samples per second, so decimated data streams are available from 1,000, 500 and 400 samples/sec down to 1 sample/sec.
You can specify the sample rate to use at four of these stages, known as taps. You can also take output from any of these four stages. The DM24 will arrange the remaining stages according to your settings.
The arguments tap-0 to tap-3 are the sample rates at each tap in turn, starting with the highest. You must ensure that each rate is lower than the previous one by a factor of 2, 4, 5, 8 (= 2 then 4), 10 (= 2 then 5) or 16 (= 4 then 4). Non-integer values are not allowed.
For example:
1000 125 25 5 samples/sec
1000 500 100 10 samples/sec
500 100 20 4 samples/sec
400 40 10 5 samples/sec
As long as you specify the initial taps, you can omit later ones. The command fills in the value of the missing taps, using a decimation factor of 2 where possible. Thus, the following commands are equivalent:
400 40 20 10 samples/sec
400 40 samples/sec
Note: Older DM24 software did not support the new GCF format for higher sample rates. It also did not properly support 250 samples/s, nor rates below 1 sample/s.
6.6.2 CONTINUOUS
Syntax: tap components CONTINUOUS
Sets which components are output under normal conditions, and at which tap(s).
tap is the tap number at which to output the triggered stream. You can set which taps output which sample rate using the SAMPLES/SEC command, described above.
components is an integer below 16, whose binary bits represent the Z (1), N (2), E (4) and auxiliary (8) components respectively.
Thus, for example:
0 1 CONTINUOUS will output the Z component only (1) at the first tap;
0 2 CONTINUOUS will output the N component only (2);
0 4 CONTINUOUS will output the E component only (4);
0 7 CONTINUOUS will output all three components (1+2+4 = 7);
0 12 CONTINUOUS will output the E component and the auxiliary component (4 + 8 = 12);
0 0 CONTINUOUS will output nothing at the first tap.
6.6.3 SET-TAPS
Syntax: tap-0 tap-1 tap-2 tap-3 SET-TAPS
This is an alternative to the CONTINUOUS command, which allows you to set the outputs for all taps simultaneously.
tap-0 to tap-3 are integers below 16, whose binary bits represent the Z (1), N (2), E (4) and auxiliary (8) components respectively. Each one sets which components are output at that tap under normal conditions.
For example, if you issue
9 7 0 15 SET-TAPS
then
tap 1 will output Z and the auxiliary component ( 1 + 8 = 9 );
tap 2 will output all three directional components ( 1 + 2 + 4 = 7 );
tap 3 will not output anything; and
tap 4 will output all four components ( 1 + 2 + 4 + 8 = 15).
To set triggered output streams, you should use the TRIGGERED command detailed below.
6.6.4 COMPRESSION
Syntax: bits size COMPRESSION or NORMAL COMPRESSION
Sets the maximum amount of compression to use. Greater compression means the digitiser packages data more efficiently, so more can be transmitted over a link with a bandwidth restriction. Compressing streams increases data latency because more samples are fitted into each packet.
The digitiser compresses data without loss, so compression is most effective when the data contain relatively little information. During large or local seismic events, the digitiser normally needs to decrease the compression level.
bits can be one of 8BIT, 16BIT and 32BIT. 8BIT (the default) is the maximum amount of compression; 32BIT denotes no compression.
size determines the maximum number of four-byte records in a GCF block. This must be between 20 and 250; the default is 250. Each record can represent 1, 2 or 4 samples, depending on the compression level.
GCF blocks must be a whole number of seconds long. If you set size to a value so small that packets would contain data for less than one second, the digitiser will ignore the exact value of size and simply output one block every second (per stream).
Thus, if you issue 32BIT 20 COMPRESSION, streams with a sample rate of 20 samples/s and higher will output one block per second, whilst lower rate streams will output 20-sample blocks: every 5 seconds for 4 samples/s data etc. The special command MINIMUM COMPRESSION is a shorthand for this.
Another special command, NORMAL COMPRESSION, returns these settings to their default values, equivalent to 8BIT 250 COMPRESSION.
6.6.5 LOWLATENCY
Syntax: LOWLATENCY
This is a special mode for applications requiring lower sample rate data in as close to real time as possible. In this mode, the digitiser takes a 200 samples/s stream and passes it through low-pass and decimation filters internally, before exposing it as a 20 samples/s stream at an increased rate of 1 block per second.
To enable low latency mode on all three components, first use SAMPLES/SEC to set Tap 0 to 200 samples/s, then issue the following commands:
NORMAL COMPRESSION
0 7 CONTINUOUS
0 1 BANDPASS
LOWLATENCY
7 TRIGGERS
If you want to enable low latency mode on some components only, replace the 7s above with another value (e.g. 1 = Z, 2 = N, 4 = E).
To disable low latency mode, issue
0 1 BANDPASS
0 TRIGGERS
Note: When LOWLATENCY is active, the TRIGGERS and BANDPASS commands have special meanings. Because of this, the STA/LTA triggering function is disabled. You can still use LEVEL triggering if you require (see below).
6.6.6 SETDSS
Syntax: output-spec SETDSS
This command alters the way the DM24 outputs its status streams.
In normal operation, the DM24 stores lines of status information until it has filled a 1K GCF block. For low latency applications, however, status information is required more frequently. In this mode, the DM24 will output a status block every minute. This mode was required by the DSS server distributed with Güralp Systems' DCM, which is now obsolete.
output-spec is an integer below 32, whose bits tell the digitiser which status lines to output.
Setting bit 0 (1) produces lines showing the current internal clock offset, frequency error, and GPS fix type. For example:
2006 9 4 13:13:00 2 MicroSeconds Fast Freq error 0 e-9 Auto 3D [-4]
Setting bit 1 (2) produces lines showing the current GPS offset, drift, PWM measure, and fix type. For example:
2006 9 4 13:13:00 o/s= 340 drift= 0 pwm= 8382 Fix= "3D"
Setting bit 2 (4) produces lines showing the GPS latitude and longitude. For example:
2006 9 4 13:13:00 Lat= "51'21.6526N" Long="001'09.8148W"
Setting bit 3 (8) produces lines like
Boot Log : Power_cycles= 11 Watchdog_resets= 51 Last boot 2006 8 23 08:49:22 2006 8 23 08:50:40 Run 12 Days 04:22:20
showing the number of times the digitiser has been reset, with the time of the last reset and the current up-time.
Setting bit 4 (16) produces lines showing the current power supply voltage and temperature. For example:
2006 9 4 13:13:00 External supply : 14.3V Temperature 29.75'C
The bits should be logically ORed (i.e. the decimal numbers added) to produce multiple status lines. For example, the command
6 SETDSS
(6 = bit 2 OR bit 4) will cause the digitiser to begin outputting status blocks containing GPS timing and position information only:
2006 9 4 13:13:00 o/s= 340 drift= 0 pwm= 8382 Fix= "3D"
2006 9 4 13:13:00 Lat= "51'21.6526N" Long="001'09.8148W"
To use a DM24 with a DCM running a DSS server, you should issue
1 SETDSS
To return to normal operation, issue the command
0 SETDSS
6.7 Variable Gain
Some DM24s have variable-gain inputs, allowing gains from unity to ×64 to selected individually for each of the main inputs. These digitisers will report the gain settings to the status stream, shortly after boot-up, in a message like
Gain Control : ADC#1 : ADC#2
Gain settings : Ch#0 *16 Ch#1 *16 Ch#2 *16 Ch#3 *2 Ch#4 *1 Ch#5 *1 Ch#6 *1
In this example, the Z, N and E channels of SENSOR A each have ×16 gain, the X channel has ×2 gain selected while all channels of SENSOR B have unity gain.
6.7.1 *GAINS
Syntax: gain *GAINS
Simultaneously sets all channels to the specified gain.
gain specifies the gain and is one of 1, 2, 4, 8, 16, 32 or 64.
The digitiser must be rebooted before this change will take effect.
6.7.2 *GAIN
Syntax: channel gain *GAIN
Set one channel to the specified gain.
channel specifies the input to be adjusted and is one of 0 (vertical), 1 (North/South), 2 (East/West) or 3 (auxiliary/calibration). On seven channel digitisers, this parameter can also be one of 4 (vertical), 5 (North/South) or 6 (East/West), referring to the components from the second instrument.
gain specifies the gain and is one of 1, 2, 4, 8, 16, 32 or 64.
The digitiser must be rebooted before this change will take effect.
6.8 Triggering
6.8.1 TRIGGERS
Syntax: components TRIGGERS
Selects which component or components can generate an STA/LTA trigger. Only these components will be examined by the triggering algorithm.
components is an integer below 16, whose binary bits represent the Z (1), N (2), E (4) and auxiliary (8) components respectively as described above. Issuing 0 TRIGGERS will disable the triggering system.
Note: When LOWLATENCY is active, this command is used to set the components which are output as low-latency streams. Issuing 0 TRIGGERS will disable the low latency mode.
6.8.2 GTRIGGERS
Syntax: components GTRIGGERS
Selects which component or components can generate a level trigger. Only these components will be examined by the triggering algorithm.
components is an integer below 16 with the same meaning as in TRIGGERS.
6.8.3 S/WTRIGGER
Syntax: S/WTRIGGER
Issues a software trigger, causing the digitiser to trigger immediately, and begin outputting triggered streams according to its configuration.
6.8.4 TRIGGERED
Syntax: tap components TRIGGERED
Selects which component or components will be output when a trigger is generated, and at which tap (sample rate).
tap is the tap number at which to output the triggered stream. You can set which taps output which sample rate using the SAMPLES/SEC command, described above.
components is an integer below 16, which represents which components to output in the same fashion as in the CONTINUOUS command, above.
Note: This command and the previous one have similar names; remember that a component TRIGGERS the system, whilst taps and components are TRIGGERED.
6.8.5 STA
Syntax: Z-secs N-secs E-secs X-secs STA
Sets the length of the short-term averaging period in the STA/LTA triggering algorithm.
Z-secs, N-secs, E-secs and X-secs define the time periods over which to calculate the average for the Z, N, E, and auxiliary components, respectively. If a component is not considered by the triggering algorithm (see TRIGGERS, above), any value you specify here for that component will be ignored.
For example, 1 1 2 2 STA will calculate short-term averages over 1 second for the Z and N components, and over 2 seconds for the E and auxiliary components.
Note: If you issue STA with only one argument, it is used for all four components. For example, 5 STA will calculate averages over 5 seconds for all components.
6.8.6 LTA
Syntax: Z-secs N-secs E-secs X-secs LTA
Sets the length of the long-term averaging period in the STA/LTA triggering algorithm.
Z-secs, N-secs, E-secs and X-secs define the time periods over which to calculate the average for the Z, N, E, and auxiliary components, respectively. If a component is not considered by the triggering algorithm (see TRIGGERS, above), any value you specify here for that component will be ignored.
For example, 15 20 20 20 STA will calculate long-term averages over 15 seconds for the Z component, and over 20 seconds for the N, E and auxiliary components.
If you issue STA with only one argument, it is used for all four components. For example, 5 STA will calculate averages over 5 seconds for all components.
6.8.7 RATIOS
Syntax: Z-ratio N-ratio E-ratio X-ratio RATIOS
Sets the ratio of STA to LTA above which a trigger will be declared in the STA/LTA triggering algorithm.
Z-ratio, N-ratio, E-ratio and X-ratio are the threshold ratios for the Z, N, E, and auxiliary components respectively. If a component is not considered by the triggering algorithm (see TRIGGERS, above), any value you specify here for that component will be ignored.
For example, 4 10 10 10 RATIOS will cause the DM24 to trigger if the STA/LTA ratio is above 4 for the Z component, or above 10 for any of the remaining components.
The arguments to this command must be integers. If you want to specify a fractional ratio, use the command FRATIOS instead.
6.8.8 FRATIOS
Syntax: Z-ratio N-ratio E-ratio X-ratio FRATIOS
Sets the ratio of STA to LTA above which a trigger will be declared in the STA/LTA triggering algorithm.
This command is exactly the same as RATIOS, except that its arguments are divided by 10 before being entered into the system. For example, the command
25 100 100 100 FRATIOS
will cause the DM24 to trigger if the STA/LTA ratio is above 2.5 for the Z component, or above 10 for any of the remaining components.
6.8.9 BANDPASS
Syntax: tap filter BANDPASS
Tells the DM24 which tap to use for STA/LTA triggering calculations.
Data are taken from this tap and passed through a band-pass filter before it is examined. This filtering maximises sensitivity within the frequency band of interest whilst filtering out noise outside this band.
The corner frequency of the band-pass filter depends on the values of tap and filter:
filter = 1 creates a filter with a corner at 10 % of the Nyquist frequency for tap tap (i.e. 5 % of its sample rate);
filter = 2 creates a filter with a corner at 20 % of the Nyquist frequency for tap tap (i.e. 15 % of its sample rate); and
filter = 5 creates a filter with a corner at 50 % of the Nyquist frequency for tap tap (i.e. 25 % of its sample rate).
When LOWLATENCY is active, this command is used to set the tap used as the source of low-latency data. Data from this tap are decimated inside the DSP and output on a separate stream at a rate ten times slower than the configured rate.
6.8.10 MICROG
Syntax: level MICROG
Sets the output level above which a trigger will be declared when using the LEVEL triggering algorithm. level is measured in counts.
6.8.11 HIGHPASS
Syntax: filter HIGHPASS
Instructs the DM24 to pass the stream(s) which generate LEVEL triggers through a high-pass filter before examining them. filter can be:
1, for a 100 s high pass filter;
2, for a 300 s filter;
3, for a 1000 s filter; or
0, to disable the high pass filter.
Note: the main continuous outputs, both transmitted and recorded are also affected by any filter specified using this command.
6.8.12 PRE-TRIG
Syntax: time PRE-TRIG
Sets the pre-trigger recording time, where time is the number of seconds of buffered data to output from before a trigger is declared.
6.8.13 POST-TRIG
Syntax: time POST-TRIG
Sets the post-trigger recording time, where time is the number of seconds of data to output after a trigger condition lapses. If an event persists for some time, all triggering components must fall below the threshold before the trigger condition will lapse; only then will the post-trigger period begin.
6.8.14 TRIGGERIN
Syntax: TRIGGERIN ENABLE | TRIGGERIN DISABLE
Enables or disables external trigger input, in instruments equipped with this option.
Enabling external trigger input allows you to trigger the DM24 from an external logic level supplied through its digital output port. This voltage can be between 5 and 10 V supplied between the Trigger In pin and signal ground. If the DM24 is triggered externally, it will behave exactly as if it had generated the trigger itself, other than relaying the trigger (see TRIGGEROUT, below).
6.8.15 TRIGGEROUT
Syntax: TRIGGEROUT ENABLE | TRIGGEROUT DISABLE
Enables or disables external trigger output, in instruments equipped with this option.
Enabling external trigger output allows you to trigger other equipment through a relay contained within the DM24 whenever it triggers. The DM24's digital output port contains two pins (Trigger out, common and Trigger out, normally-open) which are connected when it triggers. In particular, you can connect a second digitiser with TRIGGERIN ENABLE in effect, in which case triggered data from both instruments will be transmitted whenever the DM24 triggers.
If a DM24 has both TRIGGERIN ENABLE and TRIGGEROUT ENABLE in effect, only triggers which the DM24 itself has generated will be output. Triggers received through the Trigger in port will cause the DM24 to output triggered streams, but will not be passed on to other digitisers, in order to prevent trigger loops.
6.8.16 POLARITY
Syntax: 0 POLARITY or 1 POLARITY
Sets the sense of the Trigger In pin on the DATA OUT port.
With 0 POLARITY set, the Trigger In pin is active low, i.e. a trigger will be generated if this pin is connected to ground. 1 POLARITY switches the pin to be active high.
You must issue TRIGGERIN ENABLE to enable external trigger input.
6.9 Calibration
6.9.1 SINEWAVE
Syntax: component freq-or-period unit SINEWAVE
Instructs the DM24 to inject a sine-wave calibration signal, starting on the zero crossing.
component specifies which component is to be calibrated, expressed as one of Z, N/S, E/W, or ALL. Some sensors use only the Z calibration loop for all three components.
freq-or-period and unit together determine the frequency of the calibration signal. If unit is HZ, then freq-or-period is taken as a frequency, in Hertz; if SECOND, then it is interpreted as a period, in seconds.
For example:
N/S 4 HZ SINEWAVE
freq-or-period must be an integer; if you want to specify a period of, for example, 0.5 SECOND, you must specify it as 2 HZ instead.
The calibration signal will be automatically disconnected after 2 minutes (unless you have altered the setting using the MINUTE command, described below).
Whilst calibration is in progress, the fourth (auxiliary, or X) data channel is switched to monitor the returning calibration signal.
6.9.2 SQUAREWAVE
Syntax: component SQUAREWAVE
Instructs the DM24 to inject a square-wave (step function) calibration signal, consisting of a positive step on the start of the next clock minute, followed by a negative step some minutes later (by default, 2). The calibration is disconnected the same number of minutes after the negative edge.
component specifies which component is to be calibrated: one of Z, N/S, E/W, or ALL. Some sensors use only the Z calibration loop for all three components.
You can alter the duration of each step using the MINUTE command, described below.
Whilst calibration is in progress, the fourth (auxiliary, or X) data channel is switched to monitor the returning calibration signal.
6.9.3 RANDOMCAL
Syntax: component RANDOMCAL
Instructs the DM24 to inject a white-noise calibration signal generated by an onboard pseudo-random number generator.
component specifies which component is to be calibrated: one of Z, N/S, E/W, or ALL. Some sensors use only the Z calibration loop for all three components.
The calibration signal will be automatically disconnected after 2 minutes if you have not altered the setting using the MINUTE command, described below.
Whilst calibration is in progress, the fourth (auxiliary, or X) data channel is switched to monitor the returning calibration signal.
The pseudo-random number generator produces true white noise over the entire passband, as shown in the power spectral density plot below:
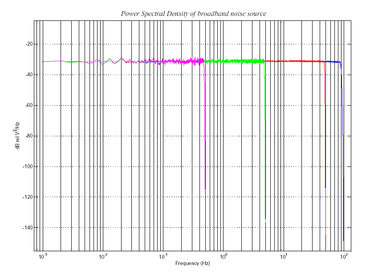
The different coloured lines show the results of experiments which measure the power spectral density over several frequency bands. Together, the results show a flat noise level over the entire passband to within experimental error.
6.9.4 MINUTE
Syntax: duration MINUTE
Sets for how long the next SINEWAVE or RANDOMCAL calibration signal will be injected, or the period of the next SQUAREWAVE calibration signal.
duration is the desired interval, expressed in minutes. If you now issue a SINEWAVE or RANDOMCAL command, the calibration will last duration minutes; if the next calibration command is SQUAREWAVE, a positive step of duration minutes will be generated, followed by a negative step of a further duration minutes.
If you do not issue MINUTE, calibration signals will default to 2 minutes.
Because of the way FORTH works, you can insert MINUTE commands into SQUAREWAVE, SINEWAVE or RANDOMCAL commands, for example:
N/S 4 HZ 5 MINUTE SINEWAVE
E/W 10 MINUTE SQUAREWAVE
6.9.5 %AMPLITUDE
Syntax: value %AMPLITUDE
Sets the relative amplitude of the signal, as a percentage. For SQUAREWAVE and RANDOMCAL calibrations, the default of 100% is normally suitable. If you have a high-gain sensor, you may have to use a lower value. For SINEWAVE calibrations, you may have to adjust the %AMPLITUDE setting to suit the frequency of the calibration signal.
You can insert %AMPLITUDE commands into calibration commands as described above, e.g.:
Z 3 MINUTE 50 %AMPLITUDE RANDOMCAL
6.9.6 AUTOCAL
Syntax: days hh mm AUTOCAL
Instructs the system to carry out an automatic calibration at time hh hours and mm minutes every days days. For example, the command
7 12 00 AUTCAL
will cause a calibration to be carried out once each week at noon.
The type of calibration and the associated parameters will be exactly as in the previous calibration, whether manual or automatic.
6.9.7 AUTOCAL?
Syntax: AUTOCAL?
Reports the current automatic calibration settings.
6.9.8 -AUTOCAL
Syntax: -AUTOCAL
Cancels any automatic calibration setting in force. If automatic calibration is not enabled, this command has no effect.
6.10 Actions
6.10.1 LOCK
Syntax: LOCK or LOCK MONITOR
Locks the sensor mass(es) of the instrument connected to SENSOR A.
If you issue LOCK, the command returns immediately, allowing you to close the terminal connection and follow the progress of the lock from the data streams.
If you issue LOCK MONITOR, the system displays the mass position for each component, measuring one position each second (i.e. one reading every 4 seconds for each component of a 4-component instrument). The process returns when locking is complete.
The mass positions are measured to 16-bit accuracy, with full deflection corresponding to values around ±32000 counts.
6.10.2 UNLOCK
Syntax: UNLOCK
Unlocks the sensor mass(es) of the instrument connected to SENSOR A.
UNLOCK returns immediately, whilst UNLOCK MONITOR monitors the progress of the unlock by displaying mass positions, as for LOCK MONITOR (above).
6.10.3 CENTRE
Syntax: CENTRE or CENTER MONITOR
Centres the sensor mass(es) of the instrument connected to SENSOR A.
CENTRE returns immediately, whilst CENTRE MONITOR monitors the progress of the unlock by displaying mass positions, as for LOCK MONITOR (above).
When the masses are correctly centred, the mass positions should read less than ±1000 counts.
6.10.4 MASSES?
Syntax: MASSES?
Begins reporting the current mass positions for all three components, once per second, until you press a key. Mass position information is also output on Mux channels M8, M9 and MA, if you have enabled them.
Over time, and especially if the temperature changes significantly, the sensor masses may drift off centre. If this is not corrected, velocity output will eventually be lost.
6.10.5 %AUTO-CENTRE
Syntax: distance %AUTO-CENTRE
Instructs the DM24 to perform a round of centring whenever a mass position drifts further than distance from zero. distance is measured as a percentage of full scale.
Setting distance to zero disables automatic centring.
6.10.6 O/SNULL
Syntax: component value O/SNULL
Note: This command is in the extended dictionary: to use it, first type ok-1 and finish with [seal].
Remove any DC offsets in a stream by applying a counter-offset in software. As manufactured, for technical reasons, the ADC offset is set to around 75000 counts. You should only need to change this if the digitiser's CMOS RAM becomes corrupted; it is always better to zero the instrument by levelling and centring as far as is possible, or by adjusting potentiometers in sensors (where these are present).
component specifies which component to adjust: 0, 1, 2, and 3 denote the Z, N, E and X components of SENSOR A, and 4, 5, 6 and 7 are the corresponding components of SENSOR B.
value specifies the adjustment to apply to the component.
6.10.7 RE-SYNC
This command is only available in units with a precision real-time clock module fitted.
Syntax: RE-SYNC ON|OFF
RE-SYNC ON instructs the DM24 to resynchronize the real-time clock module to GPS time when a GPS fix is next obtained.
RE-SYNC OFF cancels a previous RE-SYNC ON instruction, so that attaching a GPS module will no longer cause the DM24 to resynchronize.
6.10.8 ?LITHIUM
Note: This command is only available in units with a precision real-time clock module fitted.
Note: This command is in the extended dictionary: to use it, first type ok-1 and finish with [seal].
Syntax: ?LITHIUM
Query the current status of the RTC's internal battery.
6.10.9 RE-BOOT
Syntax: RE-BOOT (interactive)
Causes the DM24 to reboot after a delay of 2 s.
RE-BOOT
Confirm with 'y' ? y
Responding to the confirmation message with anything other than y will abort the reboot.
6.11 Data storage and transmission
6.11.1 SHOW-FLASH
Syntax: SHOW-FLASH
Reports status information about the Flash memory in the DM24, if fitted. For example, the output from SHOW-FLASH for a new system with 8 × 64Mb chips fitted would look like this:
512MB Flash File buffer : 16 Blocks Written 0 Unread 524,288 Free
Oldest data [16] Blank
Read point [16] Blank
Latest data [16] Blank
File Replay [16] Blank
For a system in use with 1 × 64Mb chip fitted, it might look like this:
64MB Flash File buffer : 65,536 Blocks Written 65,532 Unread 4 Free
Oldest data [36,272] GURALP TESTZ1 2003 12 3 20:20:41
Read point [36,272] GURALP TESTZ1 2003 12 3 20:20:41
Latest data [36,268] GURALP TESTX2 2003 12 4 10:09:12
File Replay [36,272] GURALP TESTZ1 2003 12 3 20:20:41
The first line displays general status information, namely the quantity of Flash memory available (64MB Flash File buffer), how many 1k GCF blocks have been written (65,536 Blocks Written), how many remain to be transmitted (65,532 Unread), and how much space (in 1k blocks) remains (4 Free).
The next lines show, in turn:
the stream and timestamp of the oldest data in memory;
the current position of the read pointer;
the stream and timestamp of the latest data in memory; and
the current position of the replay pointer.
The read pointer normally points to the oldest data in the file; however, if all the data up to the replay pointer have already been downloaded, the read pointer is set to the replay pointer and the number of blocks remaining Unread is updated.
Note: Downloads where a time-period is not specified always start from the read pointer.
6.11.2 RESET-FLASH
Syntax: RESET-FLASH
Resets the Flash memory pointers. The DM24 will start overwriting old data from the beginning of memory. You can still access these data, however, up until the point they gets overwritten (unlike ERASEFILE).
6.11.3 ERASEFILE
Syntax: ERASEFILE (interactive)
Removes all data from the Flash memory and resets all pointers to the beginning. You will be asked for confirmation before you do this, as all data will be destroyed.
If you have been running the DM24 with a FireWire disk attached, remember that there will be some data still in Flash memory awaiting transfer (up to the amount you last set with MBTRANSFER). You should make sure these data are transferred with the DISKMENU command before you issue the ERASEFILE command.
Depending on the amount of Flash memory installed, ERASEFILE may take several minutes to complete.
6.11.4 EVENTSLIST
Syntax: event-specification EVENTSLIST
Displays details of triggered events. The parameter event-specification can have several forms:
RECENT, to display the most recent events. By default, 16 events are displayed. You can double or halve this number by prefixing RECENT with either SHORTER or LONGER. You can use several of these commands together. For example, the command
LONGER LONGER RECENT EVENTSLIST
will display 64 events. The DM24 remembers this setting, so a further LONGER RECENT EVENTSLIST would display 128 events.
EARLIER, to display the previous set of events of the currently-configured length, e.g. if RECENT EVENTSLIST displays the 16 events #30 to #45, EARLIER EVENTSLIST will display the 16 events #14 to #29.
COMPLETE, to display all events currently held in Flash memory.
yyyy mm dd hh mm SEARCH, to look for events in the 10-minute period defined by yyyy mm dd hh mm, For example,
2005 12 26 04 13 SEARCH EVENTSLIST
will display events between 04:10 and 04:20 on the 26th of December, 2005. The time format is the same as for FROM-TIME and TO-TIME, as documented in section 6.12.8.
Note: If an event has occurred, but nothing was filed (for example, because the digitiser is in DIRECT mode), it will be listed with the message No File.
two numbers event-id number-of-events, to display number-of-events starting at event number event-id.
6.11.5 RESET-LIST
Syntax: RESET-LIST
Empties the events list. You will no longer be able to see event information with the EVENTSLIST command, or download events with EVENTS (see below).
This command does not delete any data. If you empty the events list, and the digitiser is in a suitable transmission mode, you can still download event data using the commands in Section 6.12, 'Downloading over the serial port'.
6.11.6 DIRECT
Syntax: DIRECT
Instructs the DM24 not to use Flash memory for storage. Instead, all data are transmitted directly to clients. A temporary RAM buffer allows clients to request blocks they fail to receive using the Block Recovery Protocol.
6.11.7 FILING
Syntax: FILING
Instructs the DM24 not to transmit blocks to clients, but to store all digitized data in the Flash memory. The memory is used in circular fashion, i.e. if it becomes full, incoming blocks begin overwriting the oldest in memory.
6.11.8 DUPLICATE
Syntax: DUPLICATE
Instructs the DM24 to transmit all new data directly to clients (as in DIRECT mode) as well as storing them in Flash memory (as in FILING mode). If a client fails to acknowledge a block, the digitiser does not attempt to retransmit it.
6.11.9 DUAL
Syntax: DUAL
Instructs the DM24 to transmit any continuous streams directly to clients (as for DIRECT mode) but to store triggered data into Flash storage (as for FILING mode).
If you choose this mode, the instrument will send heartbeat messages in addition to any continuous streams you have configured. Scream! can pick these up and download new data as necessary.
6.11.10 ADAPTIVE
Syntax: ADAPTIVE
Instructs the DM24 to transmit current blocks to clients if possible, but to store all unacknowledged blocks in the Flash memory and re-send them when time allows. This differs from DIRECT in the following ways:
the client does not have to keep track of which blocks it has not received, and
the entire Flash memory can be used for blocks awaiting retransmission, rather than a temporary RAM buffer.
ADAPTIVE mode is best suited for installations where the link between digitiser and client is intermittent.
6.11.11 FIFO
Syntax: FIFO
Instructs the DM24 to begin writing new blocks to Flash memory as for FILING, but also to transmit data to clients. Data are transmitted in strict order, oldest first; the DM24 will only transmit the next block when it receives an acknowledgement of the previous block. Once a block is transmitted, it is marked as such in the Flash memory, and may be overwritten later.
6.11.12 HEARTBEAT
Syntax: interval HEARTBEAT
When the DM24 is in FILING mode, it outputs status messages periodically over the RS232 port (see Section 7.1). This command changes how often these messages are produced.
If the digitiser has been configured to dial out over a modem link (see +MODEM, above), it will dial out whenever it generates a heartbeat message.
interval is normally measured in whole units of 30 milliseconds. For example, issuing
600 HEARTBEAT
will cause the DM24 to output heartbeat messages every (600 × 30ms) = 18,000 milliseconds = 18 seconds.
Alternatively, you can insert the word HOUR and specify interval in hours:
5 HOUR HEARTBEAT
The maximum value allowed for HEARTBEAT is 300,000,000 milliseconds, which is 2,500 hours (approximately 100 days).
If you connect to a digitiser in FILING mode using Scream!, Scream! will not detect the digitiser until it has sent a heartbeat message. Therefore, you should use a relatively short heartbeat interval if you have a continuously-connected instrument.
6.11.13 MS-GAP
Syntax: interval MS-GAP
The GCF protocol allows for transmitted data blocks to be acknowledged by the receiver in order to improve the resilience of links. Unacknowledged blocks can be re-transmitted immediately or stored for later transmission. MS-GAP sets the interval the digitiser should wait for an acknowledgement message, before assuming that the block could not be transmitted. If a period of interval passes without an acknowledgement, the digitiser's behaviour then depends on the current transmission mode (see above).
interval is measured in milliseconds. The default is 150. If the value is greater than the average time between blocks being generated, and an outage occurs in the return communications link, the digitiser will be producing data faster than it can transmit them, and gaps will start to be observed. However, systems using slower communications links (e.g. radio links) may be unable to acknowledge blocks in under 150 ms. You should choose a value for interval which is suitable for your particular installation.
6.11.14 RE-USE
Syntax: RE-USE
Instructs the DM24 to use its Flash memory as a circular buffer, overwriting the oldest data when it becomes full.
In this mode, the Flash memory will always contain the latest data.
6.11.15 WRITE-ONCE
Syntax: WRITE-ONCE
Instructs the DM24 not to overwrite data in the Flash memory when it becomes full Instead, when the digitiser runs out of space, it switches to DIRECT transmission mode and will leave the Flash memory untouched.
In this mode, the Flash memory will always contain the earliest data.
6.11.16 MODE?
Syntax: MODE?
Queries and displays the current Flash memory usage mode: RE-USE or WRITE-ONCE, as described above.
6.12 Downloading over the serial port
6.12.1 DOWNLOAD
Syntax: DOWNLOAD
Initiate a data transfer from the Flash memory over the serial connection. Scream! Can be configured to auto-record these data. Refer to the Scream manual for a detailed description of data recording; a summary is given in section 4.5.3.
The flash memory is used as a ring buffer. Two pointers into the memory keep track of where data were last read (the “Read Pointer”) and last written (the “Write pointer”). When either pointer reaches the end of physical memory, it wraps round back to the beginning. The behaviour when the write pointer reaches the read pointer (i.e. when the memory becomes full of data, none of which have been downloaded) is governed by the commands RE-USE/RECYCLE and WRITE-ONCE, described above.
Which data are downloaded depends on the current read pointer, as well as various user-configurable parameters, which allow you to select a particular stream, streams of a specified sample rate or streams within a certain time window. You can set parameters separately or string the definitions before the DOWNLOAD command. For example,
ALL-FLASH STREAM HPA0N1 DOWNLOAD
2004 12 01 00 00 FROM-TIME ALL-DATA DOWNLOAD
100 S/S ALL-TIMES DOWNLOAD
See below for full details of the parameter-setting commands.
After each download completes, the read point is normally set to indicate the start of the first unread block – i.e. where downloading would normally resume. The exception is a download issued after an ALL-DATA command, which does not affect the read point. The read point can be reset with the ALL-FLASH command, described below.
The DOWNLOAD command, when invoked with no parameters, starts another download with the same parameters as last time.
The DOWNLOAD command returns immediately, so that you can issue more commands if required. To close the connection and begin downloading, issue the GO command. You can pause the download by entering terminal mode, and then either restart it (with another GO) or abort it with the command END-DOWNLOAD.
6.12.2 ALL-FLASH
Syntax: ALL-FLASH
Sets the read point to the oldest data held by the DM24. This command does not alter which streams are to be transmitted; you should specify streams or use the ALL-DATA command in addition to this one.
6.12.3 ALL-DATA
Syntax: ALL-DATA
Instructs the DM24 to transmit all the data streams it holds next time a DOWNLOAD is issued. This command does not alter the read point or time period; you should either specify a time period or use the ALL-FLASH command in addition to this one.
6.12.4 STREAM
Syntax: STREAM stream-id (n.b. - trailing parameter)
Instructs the DM24 to transmit only the stream with ID stream-id. Stream IDs are normally a 4-character Serial no followed by a component letter and a tap number.
Note: Unlike most FORTH commands, the stream-id parameter goes after the command.
6.12.5 STATUS-ONLY
Syntax: STATUS-ONLY
Instructs the DM24 to transmit only status streams (text streams, normally with stream IDs ending in 00).
6.12.6 S/S
Syntax: rate S/S
Instructs the DM24 to transmit only streams with sample rates equal to rate. If rate is zero, only status streams are transmitted.
Note: This command should not be confused with the SAMPLES/SEC command.
6.12.7 ALL-TIMES
Syntax: ALL-TIMES
Clears any time selection in force, allowing you to download all data held by the DM24. This command does not alter which streams are to be transmitted; you should specify streams or use the ALL-DATA command in addition to this one.
6.12.8 FROM-TIME
Syntax: yyyy mm dd hh mm FROM-TIME
Instructs the DM24 to transmit only data more recent than the time specified by yyyy-mm-dd hh:mm, where:
yyyy is a four-digit year (1989 – 2069);
mm is the month number (1 – 12);
dd is the day of the month (1 – 31);
hh is the hour of the day (0 – 23); and
mm is the minute of the hour (0 – 59).
6.12.9 TO-TIME
Syntax: yyyy mm dd hh mm TO-TIME
Instructs the DM24 to transmit only data older than the time specified by yyyy-mm-dd hh:mm, where yyyy, mm, dd, hh and mm have the same meanings as in FROM-TIME, above.
6.12.10 EVENTS
Syntax: event-specification EVENTS
Instructs the DM24 to download only data recorded during triggered events. event-specification can have several forms:
RECENT, to download the most recent events. By default, 16 events are displayed. You can double or halve this number by prefixing RECENT with either SHORTER or LONGER. You can use several of these commands, e.g.
LONGER LONGER RECENT EVENTS
will download 64 events. The DM24 remembers this setting, so a further LONGER RECENT EVENTS would download 128 events.
EARLIER, to download the previous set of events, using the currently-configured length, e.g. if RECENT EVENTS downloads the 16 events #30 to #45, EARLIER EVENTS will download the 16 events #14 to #29.
COMPLETE, to download all events currently held in Flash memory.
yyyy mm dd hh mm SEARCH, to look for events in the 10-minute period containing yyyy mm dd hh mm, e.g.
2005 12 26 04 13 SEARCH EVENTS
will download events between 04:10 and 04:20 on the 26th of December, 2005. The time format is the same as for FROM-TIME and TO-TIME, as documented in section 6.12.8.
If an event occurs, but nothing is filed (e.g. because the digitiser is in DIRECT mode), it will be listed with the message No File.
two numbers event-id number-of-events, to download number-of-events starting at event number event-id. You can find out event-id using the command EVENTSLIST (described in section 6.11.4).
Thus, if EVENTSLIST returns
# 7 Filed @ 63,772 PLPGG SBHYZG 2006 1 4 16:07:50
# 8 Filed @ 63,812 PLPGG SBHYZG 2006 1 4 16:22:24
# 9 Filed @ 63,952 PLPGG SBHYZG 2006 1 5 10:14:59
# 10 Filed @ 64,005 PLPGG SBHYZG 2006 1 5 10:16:49
# 11 Filed @ 64,039 PLPGG SBHYEG 2006 1 5 10:17:45
you can instruct the digitiser to download these 5 events with the command:
7 5 EVENTS
Once you have specified the events to be downloaded, issuing DOWNLOAD will make the DM24 begin downloading data as soon as your terminal session is ended.
6.12.11 GO
Syntax: GO
Closes terminal mode, and begins the download you have set up. You can pause the download by re-entering terminal mode, and restart with another GO or abort with END-DOWNLOAD.
Once the download has completed, the DM24 will carry on transmitting real-time data, if you have so configured it.
6.12.12 END-DOWNLOAD
Syntax: END-DOWNLOAD
Aborts any downloads which were in progress at the time you entered terminal mode.
6.13 Downloading over FireWire
6.13.1 DISKMENU
Syntax: DISKMENU (interactive)
This command displays a menu which allows you to select various options for transferring data over the optional FireWire interface to a connected device. When you issue this command you will see the message
Plug in FireWire cable
and the DM24 will wait for you to plug in a compatible disk. When it detects one, it will print out information about the disk:
FireWire Connection *BR
Node: FFC1 #Nodes 2
Reading Node FFC0 .
LaCie Group SA
1394-IDE Rev B2
LaCie DATA BANK drive LUN 0
Logging on @AgentCSR= 0010:00000
Capacity 39.0GB
Press a key for options else
7 seconds to automatic disk backup
At this point, pressing a key will cause the DM24 to display an options menu and then pause. If you do not press a key within seven seconds, the disk will be automatically backed up.
The menu looks like this:
Disk Options :-
(A) save All data
(N) save New data
(S) save Selected time window
(D) Directory – contents
(R) Reset disk – overwrite
(X) eXit
A/N/S/D/R/X ?
During the operation of any of these options, progress reports will occasionally be displayed on the terminal.
6.13.2 MBTRANSFER
Syntax: size MBTRANSFER
If a FireWire disk is plugged in to the DM24 when you are not running DISKMENU, and there are enough new data in Flash memory, the DM24 will automatically transfer the new data to the disk.
The MBTRANSFER command sets how much new data there needs to be before the DM24 will power up the disk and transfer it. If the disk is left attached, the DM24 will then wait until it has collected the same amount of data again before starting another transfer.
size is the amount of data to transfer, in megabytes; it must be greater than 10 and less than the total quantity of Flash memory in the device. Larger values will save power, because the disk needs to be accessed less often.
If you plug a FireWire disk into the DM24 when there is less than size Mb of data ready, no data will be transferred. If you need to transfer smaller amounts of data, you should use the DISKMENU system.
Note: The number of files stored on a disk is limited to 510. This may prevent you from using the full capacity of the drive if the value of MBTRANSFER is chosen to be particularly low. For example, a setting of 10Mb for MBTRANSFER will limit the total quantity of data stored to 5.1Gbytes, regardless of the drive capacity.
6.13.3 DIR
Syntax: DIR (interactive)
Lists the files already present on a FireWire disk. When you issue this command you will see the message
Plug in FireWire cable
and the DM24 will wait for you to plug in a compatible disk. When it detects one, it will display information about the disk and list all the files that it contains. Each time you use DISKMENU to download data, or power on the digitiser with a FireWire disk connected (and enough new data to trigger a download), a new file is created.