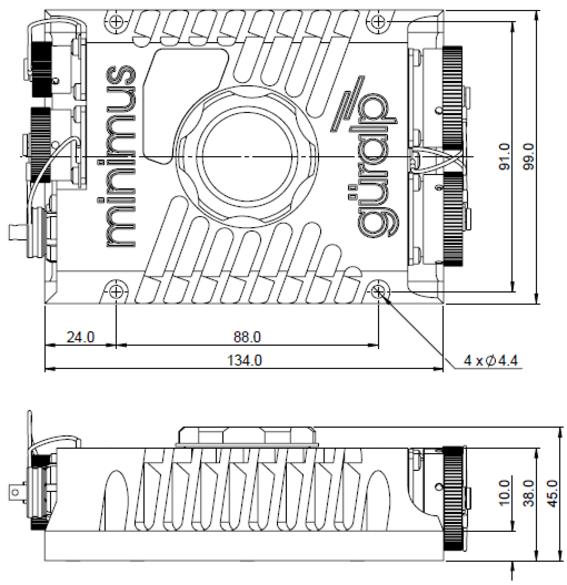
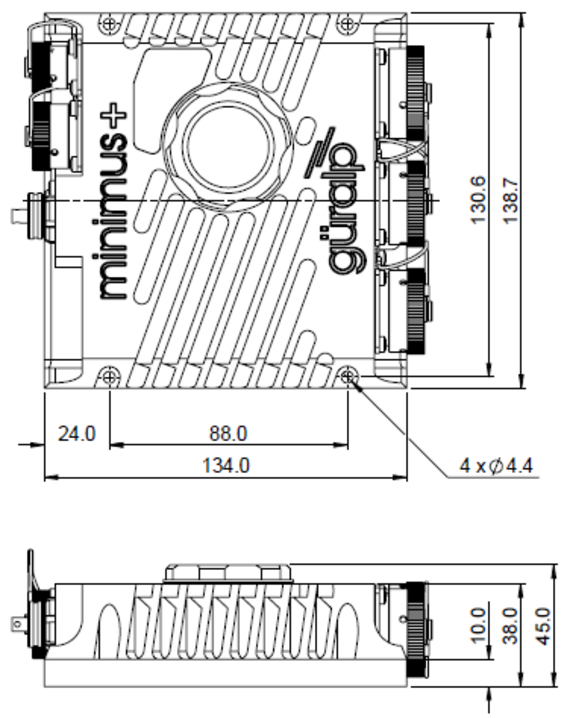
MAN-MIN-0001 - Güralp Minimus - Technical Manual PreviousNext 1. Preliminary Notes 2. System Overview 3. System description 4. Getting started 5. System configuration 6. GüVü app 7. Advanced troubleshooting 8. Appendix 1 – Instrument/channel names 9. Appendix 2 – Minimus network ports 10. Appendix 3 – Connector pin‑outs 11. Appendix 4 – Dimensions and drawings 12. Appendix 5 – Güralp Discovery installation 13. Appendix 6 – I.P. address configuration on PC or Laptop 14. EU Declaration of Conformity 15. Revision History Section Index: 11.1 Minimus 11.2 Minimus+ Chapter 11. Appendix 4 – Dimensions and drawings 11.1 Minimus 11.2 Minimus+ PreviousNext 1. Preliminary Notes 2. System Overview 3. System description 4. Getting started 5. System configuration 6. GüVü app 7. Advanced troubleshooting 8. Appendix 1 – Instrument/channel names 9. Appendix 2 – Minimus network ports 10. Appendix 3 – Connector pin‑outs 11. Appendix 4 – Dimensions and drawings 12. Appendix 5 – Güralp Discovery installation 13. Appendix 6 – I.P. address configuration on PC or Laptop 14. EU Declaration of Conformity 15. Revision History