Chapter 4. Calibration
The 5T Compact is supplied with a comprehensive calibration document and it should not normally be necessary to calibrate it yourself. However, you may want to check that the response and output signal levels of the sensor are consistent with the values given in the calibration document.
4.1 Absolute calibration
The sensor's response (in V/ms-2) is measured at the production stage by tilting the sensor through 90 ° and measuring the acceleration due to gravity. In addition, sensors are subjected to the “wagon wheel” test, where they are slowly rotated about a vertical axis.
The response of the sensor traces out a sinusoid over time, which is calibrated at the factory to range smoothly from 1 g to –1 g without clipping.
4.2 Relative calibration
The response of the sensor, together with several other variables, is measured at the factory. The values obtained are documented on the sensor's calibration sheet. Using these, you can convert directly from voltage (or counts, as measured in Scream!) to acceleration values and back. You can check any of these values by performing calibration experiments.
Güralp sensors and digitizers are calibrated in the following way:
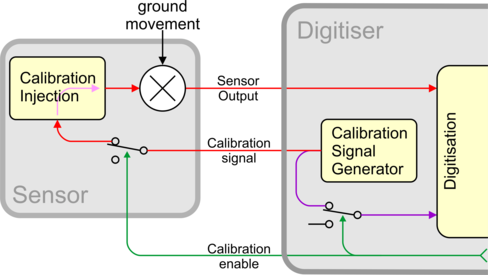 In this diagram, a Güralp digitizer is being used to inject a calibration signal into the sensor. This can be either a sine wave, a step function or broad-band noise, depending on your requirements. As well as going to the sensor, the calibration signal is returned to the digitizer on a full rate channel (older digitizers used one of the 4 Hz auxiliary (Mux) channels). The calibration signals and sensor output all travel down the same cable from the sensor to an analogue input port on the digitizer.
In this diagram, a Güralp digitizer is being used to inject a calibration signal into the sensor. This can be either a sine wave, a step function or broad-band noise, depending on your requirements. As well as going to the sensor, the calibration signal is returned to the digitizer on a full rate channel (older digitizers used one of the 4 Hz auxiliary (Mux) channels). The calibration signals and sensor output all travel down the same cable from the sensor to an analogue input port on the digitizer.
The signal injected into the sensor gives rise to an equivalent acceleration (EA on the above diagram) which is added to the measured acceleration to provide the sensor output. Because the injection circuitry can be a source of noise, a Calibration enable line from the digitizer is provided which disconnects the calibration circuit when it is not required. Depending on the factory settings, the Calibration enable line must be either allowed to float high (+5 to +10 V) or held low (0V, signal ground) during calibration: this is specified on the sensor's calibration sheet.
The equivalent acceleration corresponding to 1 V of signal at the calibration input is measured at the factory and can be found on the sensor calibration sheet. The calibration sheet for the digitizer documents the number of counts corresponding to 1 V of signal at each input port.
The sensor transmits the signal differentially, over two separate lines. This improves the signal-to-noise ratio by increasing common mode rejection. If you are not using a Güralp Systems digitizer, the voltage across the output pins should be halved before converting to acceleration.
5T Compact instruments are tuned at the factory to produce 1 V of output for 1 V input on the calibration channel. For example, a sensor with an acceleration response of 0.25 V/ms-2 should produce 1 V output given a 1 V calibration signal, corresponding to 1/0.25 = 4 ms-2 = 0.408 g of equivalent acceleration.
4.3 Calibrating accelerometers
Both the DM24 digitizer and Scream! software allow direct configuration and control of any attached Güralp instruments. For full information on how to use a DM24 series digitizer, please see its own documentation. If you are using a third-party digitizer, you can still calibrate the instrument as long as you activate the Calibration enable line correctly and supply the correct voltages.
In Scream!'s main window, right-click on the digitizer's icon and select Control.... Select the Calibration tab.
Under Component, select ALL. The 5T has a single Calibration Line for all three components. Other choices will not have a useful effect.
Make any other choices you require and click Inject now. A new data stream, ending Cn (n = 0 – 7) or MB, should appear in Scream!'s main window containing the returned calibration signal.
Open a Waveview window on the calibration signal and the returned streams by selecting them and double-clicking. The streams should display the calibration signal combined with the sensors' own measurements. If you cannot see the calibration signal, zoom into the Waveview using the scaling icons at the top left of the window or the cursor keys.
If you need to scale some of the traces individually, right-click on each desired trace and select Scale.... You can then type in a suitable scale factor for that trace.
Click on Ampl Cursors in the top right hand corner of the window. A white square will appear inside the Waveview at the top left. This is in fact two superimposed cursors.
Drag one cursor down to be level with the lowest point of the signal trace.
Drag the other down to be level with the highest point. In the following example, a step function of 1 minute duration has been applied to the Z3 stream. Note that ground movements continue to be observed, superimposed on the returned calibration signal.
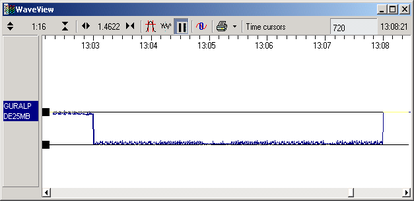
The Ampl Cursors button will now be displaying a value, which is the strength of the returned signal in counts (doubled, if using a sine wave). Measure the other two signal strengths in the same manner.
Note that if you have used the Scale... option described above, you will need to take the scale factor into account to produce the correct number of counts. For example, if the C2 (calibration input) signal has been scaled by a factor of 40, the signal strength as measured by the Ampl Cursors must be divided by 40 to yield the correct value.
Convert to volts using the µV/Bit values given on the digitizer's calibration sheet for the relevant input ports and compare the returned signal with the input calibration signal (C2).
Suppose we measure the following values:
Input calibration signal strength (C2) | 697,221 counts |
Returning signal strength (Z3) | 701,512 counts |
The calibration sheets provide us with the remaining values needed to calibrate the sensor. For example, we might have:
Sensor acceleration response | 0.254 V/ms-2 |
Equivalent accel. from 1V calibration | 1.968 ms-2 |
Digitizer input port sensitivity | 3.507212 µV/Bit |
Calibration channel sensitivity | 3.491621 µV/Bit |
If you know the local value of g, you can also perform absolute calibration by tilting the sensor by 90° and varying the calibration signal until it precisely compensates for the signal generated due to gravity.
Calibrate any other sensors connected to the digitizer in the same way. You must wait for the previous calibration to finish before doing this: clicking Inject now has no effect whilst the Calibration enable relay is open.
From these, we calculate that the calibration signal is producing 697,221 × 3.491621 = 2,434,431 µV (2.434 V). This corresponds to an equivalent input acceleration of 2.434 × 1.968 = 4.791 ms-2.
The sensor's acceleration response is given as 0.254 V/ms-2, so that an acceleration of 4.791 ms-2 will produce an output of 0.254 × 4.791 = 1.217 V (1,216,904 µV), which corresponds to a count number at the digitizer's input port of
1,216,904 / 3. 507212 = 346,972 counts.
Because this calibration is being carried out with a differential-output sensor, the count number observed at the digitizer should be double this: 693,944 counts. All Güralp Systems sensors use balanced differential outputs.
The actual signal at the digitizer of 701,512 counts is within 1.5% of this value, indicating that the sensor is adequately calibrated.
If you prefer, you can inject your own signals into the system at any point (together with a Calibration enable signal, if required) to provide independent measurements and to check that the voltages around the calibration loop are consistent. For reference, a DM24-series digitizer will generate a calibration signal of around 16,000 counts (4V) when set to 100% (sine-wave or step) and around 10,000 counts (2.5 V) when set to 50%.
4.3.1 Open-loop calibration
The 5T Compact exposes a logic level control line on the signal connector which switches the instrument into open-loop mode whilst it is activated. In this mode, force feedback to the masses is disabled, leaving each one free to oscillate at the fundamental resonance frequency of its spring. Voltages representing the acceleration of the masses can be measured on the normal channels.
On the Hand-held Control Unit, the logic line is connected to the 1 SEC VEL/BB VEL switch. Move this switch to “1 SEC VEL” to enable open-loop mode. You can carry out calibration experiments whilst in this mode. Move the switch back to “BB VEL” to restore normal operation.
Opening the feedback loop merely enables the masses to move freely. If the masses are already near their equilibrium positions, switching to open-loop mode will not have a large effect.
4.4 The calibration pack
All Güralp sensors are fully calibrated before they leave the factory. Both absolute and relative calibration calculations are carried out. The results are given in the calibration pack supplied with each instrument.
4.4.1 The calibration sheet
The calibration sheet provides the measured acceleration output over the flat portion of the sensor frequency response in units of volts per metre per second squared (V/ms-2). Because the sensor produces outputs in differential form (also known as push-pull or balanced output), the signal received from the instrument by a recording system with a differential input will be twice the true value. For example, the calibration sheet may give the acceleration response as “2 x 0.50 V/ms-2”, indicating that this factor of 2 was not included in the value given.
Caution: Never ground any of the differential outputs. If you are connecting to a single-input recording system, you should use the signal ground line as the return line and ignore the inverting output.
4.4.2 Frequency response
The poles and zeroes table describes the frequency response of the sensor. If required, you can use the poles and zeroes to derive the true ground motion mathematically from the signal received at the sensor. The 5T Compact is designed to provide a flat response (to within 3dB) over its passband.
Güralp Systems performs frequency response tests on every sensor at the time of manufacture. All records are archived for future reference. The results of these tests are provided with the sensor.
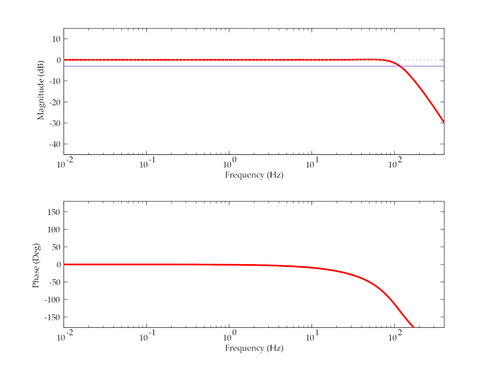
When testing the instrument to confirm that it meets its design specification, the range of frequencies used are concentrated over about 3 decades (i.e. 1000 : 1) of excitation frequencies. Consequently, the frequency plots of each component are provided in normalised form. Each plot marks the frequency cut-off value (often quoted as “-3 dB” or “half-power” point).
4.4.3 Obtaining copies of the calibration pack
We keep a copy of all calibration data that we send out. In the event that the calibration information becomes separated from the instrument, you can obtain all the information using our free email service. Simply email caldoc@guralp.com with the serial number of the instrument in the subject line. For example,
The server will reply with the calibration documentation in Word format. The body of your email will be ignored. If you need multiple documents, enter all the serial numbers in the subject line, separated with spaces and/or commas.