Chapter 9. Digitiser Synchronisation
Accurate time-stamping of samples is essential to seismology. Güralp Systems Ltd recommend the use of GPS receivers for generating clock signals wherever possible: they are the most accurate time sources available for all practical purposes (but see below: GPS is best used indirectly). Where GPS receivers cannot be used but an internet connection is available, Network Time Protocol (NTP) can produce acceptable results. Platinum firmware can produce NTP-synchronised NMEA output for use with GPS-capable devices.
All acquisition modules have an internal clock which is used to time-stamp log-file entries (but not data samples). This clock is managed by the NTP subsystem but need not necessarily use Internet NTP servers (and normally doesn't).
DAS units, Cylindrical Digitisers and Integrated Instruments have two clocks: the digitiser clock and the acquisition module clock: the former is used to time-stamp data samples and the latter to time-stamp log-file entries. The acquisition module clock is also managed by NTP. The two clocks can be synchronised in a number of ways.
9.1 Overview and important notes
Acquisition modules can synchronise their internal clocks to three different time sources:
special timing signals, known as RTSTATUS packets, produced by a digitiser
internet NTP
signals from a GPS receiver
GPS receivers produce two signals:
NMEA, which is a serial, ASCII data stream consisting of a sequence of “sentences” which convey information such as the time (to the nearest second), the position, the number of satellites visible and much more
PPS, which is a one-pulse-per-second signal which accurately signals the start of each second
GSL digitisers, such as the DMG-DM24, use both signals to accurately synchronise their internal clocks.
Because of a limitation in the Linux kernel on ARM processors, the CMG-DCM and CMG-EAM cannot make use of the PPS signal. This means that a DCM or EAM synchronised directly to GPS can be several hundreds of milliseconds adrift. While this is not crucial - the clock is only used to time-stamp log-file entries - it does make direct synchronisation to GPS the least accurate of the three options available.
We recommend the following synchronisation strategy:
If GPS is available, synchronise the digitiser(s) directly to GPS and synchronise the acquisition module to the RTSTATUS packets from the digitiser.
If GPS is not available but an internet connection can be used, synchronise the acquisition module to internet NTP and enable the NMEA output, to which the digitiser can then be synchronised.
If neither GPS nor internet NTP are available, contact technical support for advice.
9.2 RTSTATUS packets
Where a CMG-EAM or CMG-DCM is used with an external GPS-synchronised GSL digitiser, the digitiser can emit special synchronisation packets called RTSTATUS packets. These are transmitted along the same link as the data packets. Platinum units can use these as a time source for NTP: see section 7.4 for more details.
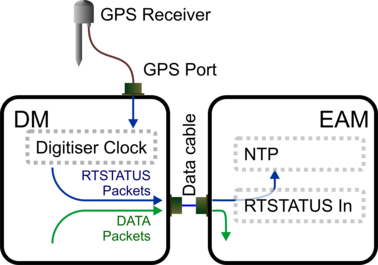
Note: RTSTATUS packets are available with MkIII DM24 units. Earlier units, such as MkIIs, are not capable of generating these packets. With MkIIs, however, the system clock can be set from GCF status block timestamps by enabling this feature on the expert settings of the appropriate serial port GCF input page.
Note: RTSTATUS packets are available with CD24 units running firmware revision 279 and above.
This is also the recommended configuration for CMG-DAS units, where GPS reception is available.
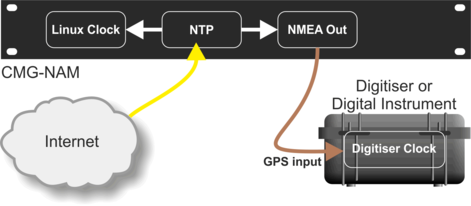
9.3 Using NTP with CMG-NAM units
Where GPS reception is not practical but an internet connection is available, NTP can be used to synchronise the Platinum clock, which can then generate NMEA output. This NMEA data-stream can be fed to the GPS input of the digitiser module using an external cable from a serial port.
Note: This technique is only applicable to CMG-NAM and CMG-NAM64s, where the Linux kernel can correctly handle the incoming PPS from the GPS receiver.
The data flow when Internet NTP is used is illustrated below:
To configure the NTP subsystem, see section 7.4.
To configure NMEA output, see section 9.7.
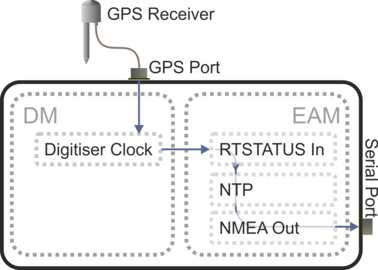
9.4 Using GPS with Cylindrical Digitisers
Güralp Systems Ltd's cylindrical digitisers provide a CMG-DM24 and a CMG-EAM in a single package. An internal, bi-directional connection is available between Port C of the EAM and the digitiser module. This connection can operate in one of two modes:
The EAM's NTP subsystem can provide NMEA to the digitiser module's clock circuitry. In this case, the external GPS socket is automatically disconnected. This is the recommended configuration when GPS synchronisation is impossible but internet NTP is available; or
An external GPS receiver can provide input to both the digitiser module's clock circuitry and the EAM's NTP subsystem. This configuration is possible but not recommended.
Note: Where GPS is available, you should always synchronise the EAM to the digitiser's RTSTATUS packets rather than directly to GPS, as explained in section 9.1.
The data flow when a GPS receiver is used is illustrated below:
If required, the NTP subsystem can provide NMEA output via a serial port which can then be used to synchronise an additional digitiser. This, however, is optional and no serial port is dedicated to this use.
To configure the NTP subsystem, see section 7.4.
To configure NMEA as an NTP clock source, see section 9.6.
To configure NMEA output, see section 9.7.
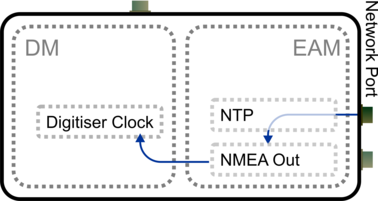
9.5 Using NTP with Cylindrical Digitisers
Note: Where GPS is available, you should always synchronise the EAM to GPS, via the digitiser's RTSTATUS packets, rather than to NTP.
Please see the discussion of synchronisation options available with Cylindrical Digitisers in the previous section.
The data flow when NTP is used as the primary clock source is illustrated below:
To configure the NTP subsystem, see section 7.4.
To configure NMEA output, see section 9.7.
Note: The external GPS connector is disconnected when Port C of the EAM is set to “NMEA Out” and connected to the digitiser's GPS input in all other cases.
9.6 Configuring NMEA as an NTP clock source
To configure NTP to use NMEA as a clock source, two steps are required. First, tick the Acquire time from connected GPS check-box in the NTP configuration page as described in section 7.4.
Secondly, configure the relevant serial port as an NMEA input.
To do this using the web interface select:
Configuration → Serial ports
or
Configuration → All options → Serial ports
To configure an NMEA input from the command line, start gconfig and select “Serial ports” from the top level menu.
Select a serial port from then click NMEA output settings.
Note: For cylindrical digitisers, this will be Port C. For more details of Cylindrical Digitisers, please see section 15.1.
9.6.1 Configurable parameters
Port function: Set to “NMEA in. Receive GPS data for NTP”
Port speed: Set to 4800.
Click  to save the changes.
to save the changes.
9.7 Configuring NMEA output
Platinum can generate simulated GPS data (NMEA-0183) to synchronise a connected digitiser's clock. In this case, the internal clock of the acquisition module is used as a reference for the digitiser. In order to provide a sufficiently accurate time-stamp, the clock must be controlled using NTP (See section 7.4).
To configure NMEA Output using the web interface select:
Configuration → Serial ports
or
Configuration → All options → Serial ports
To configure NMEA Output from the command line, start gconfig and select “Serial ports” from the top level menu.
Next, select the serial port from which you want to output NMEA. Only one port can be used for NMEA output at any time: the timing constraints are such that a single processor cannot produce the pulse-per-second (PPS) signal on two ports simultaneously with sufficient accuracy.
Note: For Cylindrical Digitisers, Port C should be used in order to provide NMEA output to the internal digitiser module. If a GPS receiver is used, the “Data Out” Port (exposed as the DATA connector) can be used to provide timing to additional, external digitisers.
9.7.1 Configurable parameters in simple mode
Port function: Set to “NMEA out. NMEA (time + fixed position) output”
Port speed: Set to 4800.
Click to save these changes.
Go back to the configuration of the serial port and click on “NMEA output settings”. You will see this screen:
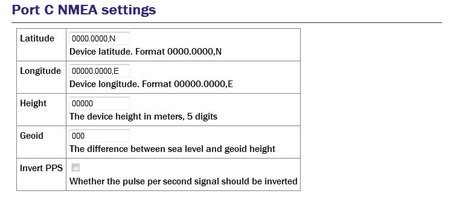
Here, you can configure the NMEA sentences that will be sent to the digitiser. You can specify the location (latitude, longitude, elevation), the geoid (the offset of the location from the theoretical earth surface) and whether to invert the Pulse-Per-Second signal (if unchecked, the PPS line will be briefly asserted each second, on the second, and held to ground at other times). It is not essential that the position string sent matches the physical location of the digitiser, as only the GPS time signal is used by the digitiser. Click to save the changes.
9.7.2 Configurable parameters in expert mode
The following additional parameters are available in expert mode:
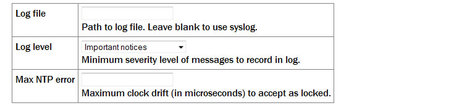
Log file: It may sometimes be desirable, for debugging purposes, to separate log messages for this transmitter from the standard system log. The text field can be populated with a path name which will then be used for dedicated logging. If left blank, logging occurs (via the standard Linux syslog facility) to /var/log/messages.
Log level: The drop-down menu controls the level of detail present in log messages, whether to syslog or to a dedicated log file. Not all of the standard syslog logging levels are available. The menu offers a choice (in order of decreasing detail) of:
Debugging information
Informational messages
Important notices
Warnings
Max NTP error: Controls the accuracy of synchronisation which must be achieved by NTP before the resulting NMEA sentences will will indicate that the “GPS” is locked.