The seismometer installed in the Aquarius is a weak motion orthogonal three-axis digital feedback broadband velocity sensor, with flat response between 120 seconds and 100 Hertz and sensitivity equivalent to an analogue 2000 V/ms⁻¹ sensor. The seismometer is operational at any angle, without the need of any gimbals, thus guaranteeing the end user the ability to record good data whichever way the OBS lands on the seabed. A three-axis magnetometer and a MEMS accelerometer are also included to allow calculation of the seismometer’s three-dimensional position on the seabed, allowing the end user to rotate the signals in post-processing. Raw data from the MEMS and from the magnetometer are sent to the surface only when a “Status” is requested from the surface via acoustic modem. These data are not stored in the SD card.
The seismometer is located at the bottom of the central part of the low–profile pressure canister for best coupling with the seabed sediments.
The components of the Aquarius seismometer do not need to be locked during transportation and deployment. The sensor will auto-centre the three components. If centring operation fails, the unit will wait and retry after a time interval. The time interval will double every time it fails to centre.
4.2 Ultra Low Power Digitiser (ULPD)
The core of the OBS is a five-channel Ultra Low Power Digitiser (ULPD) with 24-bit resolution. It monitors and controls the systems including, power distribution and storage of data so it is always running when power is connected.
Three channels of the digitizer are used for the three components of the seismic sensor, a fourth for the (optional) hydrophone and the fifth channel is used for the Keller pressure sensor.
The ULPD has three main states:
Undeployed
Deployed and recording
Deployed without recording.
The ULPD is in the “undeployed” state, only after a power cycle (when the off plug is removed, see Section 4.12) or after a system reset (see Section 7.1.3.2). In this state the system is in high power mode and is synchronising the clock with PTP.
Just before a deployment the user will have to bring the ULPD to the “Deployed and recording” state (see Section 7.2.7 and Section 7.1.3.2). In this state the system will be in low power mode and the clock is free running.
After the recovery the ULPD can be set to the “Deployed without recording” state following the procedure described in Section 10.3. In this state the system will be in high power mode, but clock synchronising is disabled.
In “Deployed and recording” state sensors data are stored in the volatile memory (RAM) before being offloaded to the LPC’s Micro SD cards. What is stored is configured prior to deployment. To optimize the power consumption, all the recorded channels have a fixed sample rate and are called FR (Fixed Recording), see Section 7.2.4.
An offload of data will be triggered every 45 minutes. The ULPD will also calculate the STA, the LTA and their ratio stream. If required, a threshold trigger can be set on the ratio stream to force a data offload to the LPC when an event is detected. Whenever an offload occurs, the ULPD will boot up the LPC, enabling it to process the data and store them in the SD card after which the ULPD will power off the LPC.
The acoustic modem output is also monitored by the ULPD. This is used to turn on the LPC when data is received through the modem, allowing it to manage the acoustic communication.
A timer can be set in the ULPD for activation of the Burn-Wire release system. This is usually used as a back-up of the acoustic system: in the unlikely event that the release system cannot be activated via acoustic modem, the ULPD will release the ballast at the pre-set time.
The ULPD also monitors the PoE power supply, when this comes on, the LPC will boot up or re-boot, in full power mode with the LAN enabled.
The ULPD is equipped with a triaxial Micro Electro-Mechanical Systems (MEMS) accelerometer with a measurement range of ±2 g and a Magnetometer. These are used to calculate the orientation of the Aquarius when it is on the sea bed.
The ULPD clock is a double temperature compensated VCXO and at stable temperature is expected to drift less than a millisecond per day.
There is a serial console access to the ULPD, available when the OBS is on the surface, this is available through the Seacon Hummer series connector on the top of the Aquarius canister (see Section 12.2).
4.3 Low Power Computer (LPC)
The main computer in the unit is a Güralp Minimus, configured as an Aquarius. The operation principles of the LPC are largely identical to that of a Minimus, please refer to the Güralp Minimus manual MAN‑MIN‑0001 for non-OBS specific topics outside of this document.
This Low-Power Computer (LPC) has a much more powerful processor and it uses significantly more power than the Ultra Low Power Digitiser, this is why the LPC is powered off by the ULPD when not required.
When power is applied to the LPC it can boot in different modes, depending on the ULPD state. When the ULPD is “undeployed” the LPC will boot up in full power mode with the LAN enabled. If the LPC is booting up with the ULPC either in “deployed and recording” state or in “deployed without recording” state, the LPC will boot in low power mode with the LAN disabled. Turning the PoE on, whatever is the ULPC state, it will reboot the LPC with the LAN enabled. For this reason, when the ULPC is either in “deployed and recording” state or in “deployed without recording” state, the LPC web server will be accessible only by turning on the PoE.
The LPC firmware manages the acoustic communication, being able to perform operations requested via acoustic commands sent from the surface through Discovery software. The LPC will also be turned on by the ULPD when the latter sees acoustic data transmission.
When the LPC boots in the Deployed state to offload data, it will be in low power mode so it will not only transfer the data to the SD cards.
When the OBS is first powered on, it is in a Pre-Deployment mode: LAN enabled, not recording and aiming to get a time lock from the PTP time server. When the LPC will be synchronized by PTP, the time will be passed to the ULPD.
Clicking the “Deploy” button starts data recording in the ULPD and will shut down the LPC. The “Deploy” state is also recorded in the ULPD and it is maintained until next power cycle. The ULPD clock will start free running when the “Deploy” button is pressed. When the LPC boots in “Deploy” mode it will be in low power mode and the LAN will be off.
At the recovery, the system will have to be powered by PoE to reboot the LPC in normal power mode, with the LAN on. Clicking the “Stop Recording” button will stop the recording in the ULPD, but will keep it in deployed state. The time offset between the LPC time, synchronized via PTP, and the ULPD free running clock should be noted down once PTP stability is close to 100%. Clicking the “Undeploy” button will reset to the “undeployed” state and reboot both LPC and ULPD without saving the time offset.
There is a serial connection to the LPC, when the Aquarius is on the surface, this is available on the Seacon Hummer connector (see Section 12.2).
4.4 Acoustic modem
The Aquarius is equipped with a directional or omni-directional acoustic modem to communicate with the deck unit during deployment and recovery. Most of the time the acoustic modem will be in sleep mode using very little power. The modem will change to listen mode when it receives a wakeup signal acoustically or from the OBS. The modem will go back to sleep mode after four minutes of inactivity.
In sleep mode the modem has a nominal power consumption of 7.4mW and it is powered by 2S batteries (see Section 4.5). When it is awake the input voltage range is 11-16.8 V and it is powered at 14 V by the built-in power board installed in the Aquarius. The acoustic modem has a slant range >8,000 m (typically 10,000 m) and it uses a Lower Medium Frequency (LMF) rated for operations up to 6000 m depth.
The acoustic modem can directly control the Burn-Wire for the ballast release and it is activated by the 14 V supply.
4.5 The battery system
The unit is equipped with rechargeable Lithium-ion batteries sized for a fifteen-month deployment. Re-charge time is approximately one hour of charge time for each month of deployment.
The batteries are arranged in groups of 39 cells, connected in parallel, referred to as a 1S. Each cell has a nominal capacity when fully charged of 3.5 Ah. When flat the batteries will be at 2.5 V, rising up to 4.25 V when fully charged.
Within the OBS there are 6 compartments, each of which contains a battery pack. This battery pack is referred to as a 2S, as it is composed by 2 x 1S packs connected together in series.
The battery packs are connected back to the system as individual units to allow greater flexibility and to allow each 1S to be monitored independently, when charging. See Section 5 for details about the charging process.
The total capacity of the 6 x S2 packs (468 cells total) is 819 Ah @ 7.27 V nominal. The overall energy stored in the full pack of batteries is 5954 Wh.
Caution: Lithium ion batteries can explode violently if incorrectly charged. Use only the supplied charging equipment and always follow the instructions when charging.
Caution: Air transport safety regulations limit the maximum battery wattage allowed when travelling on a passenger plane to 100 Wh, making it illegal to transport these batteries on a passenger flight.
4.6 Accessory Devices
4.6.1 APG
The Aquarius may be fitted with an 8CB4000-I Paroscientific Absolute Pressure Gauge (APG) with 400 bar (40 MPa) full scale and 0.01% accuracy. Resolution can go up to 10-8 (nanoresolution), but in order to reduce its power consumption, the APG has been set to work in standard mode (parts per million resolution). The APG provides the ultimate precision in water level measurements and is ideal for applications such as Tsunami detection, wave and tide gauges or as an accurate depth sensor.
The APG is connected via RS-232 serial interface to the ULPD that records its data at a fixed sample rate of 5 sps.
4.6.2 Hydrophone
The Aquarius may be fitted with a HTI-04-PCA / ULF hydrophone with a 0.01 Hz to 8 kHz frequency response and -194 dB (1 V/µPa) sensitivity.
The hydrophone is connected to the ULPD, which digitises and records its data at a fixed sample rate of 100 sps.
4.7 Keller pressure sensor
The Aquarius is fitted with a piezoresistive pressure transducer type Keller PA-10L with full scale 400 bar (40 MPa) and has an accuracy of 0.25%. The transducer can resolve water depth to 0.1m.
This sensor is used to calculated the depth of the OBS when a “status” is requested via acoustic link and it is also used to automatically turn on the recovery aids when the instruments comes back to the surface.
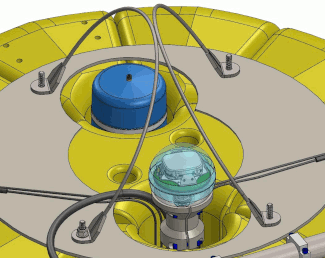
4.8 Buoyancy
The buoyancy of the Aquarius is provided by a syntactic foam block and allows it to come back to the surface when the ballast is released. The circular buoyancy block is placed over the Aquarius canister, with a central hole allowing access to the top of the sensor canister. The buoyancy is painted Signal Yellow to aid visability.
4.9 Recovery aidsZ
4.9.1 Satellite Tracker
Aquarius includes a satellite asset tracker housed in a 4.5” Vitrovex glass sphere. The system is powered by the OBS internal battery pack.
When the OBS comes toward the surface and the reading of the Keller pressure sensor indicates a suitable depth (about 15m), the recovery system is switched on.
When the recovery system is on, the satellite tracking system will get a GPS fix and transmit the position using the satellite modem embedded in the system. The position is sent every 35 minutes via email and SMS or it is retrievable using a web portal.
An example of web portal is Wireless Innovation in the image below
The recovery system also includes a set of four bright LEDs, housed in the Vitrovex glass sphere. The LED strobe is switched on together with the satellite tracker by the pressure sensor.
To minimize power consumption, the LED strobe will be switched off during day by a phototransistor. The strobe will automatically turn on during night or in poor light conditions.
4.10 Ballast and release system
The ballast for the Aquarius is provided by a double-layer steel ring attached to the bottom of the Aquarius. The ballast is suspended from the Aquarius by two straps, one either side, which are held in tension by two arms on the top of the unit. These arms are held together by a single Burn-Wire.
To release the unit a current is passed between the Burn-Wire and a cathode, causing the Burn-Wire to corrode rapidly, thus breaking and releasing the unit. When the Burn-Wire has broken the unit will float to the surface thanks to the lifting force provided by the syntactic foam block.
The Burn-Wire release can be activated either by the acoustic modem or by the timer set in the ULPD. When the modem sends the command, the power to burn the wires is provided by the same switching supply used to power the acoustic modem and providing 14 V. In this scenario, it takes approximately ten minutes for the wire to break. In the other case, when the ULPD activates the sequence, only a 2S batteries voltage is sent to the Burn-Wire system and the release takes around twenty minutes. This time, being related to the voltage provided to the Burn-Wire system, will depend on the State of Charge of the batteries.
4.11 The Underwater Cable Loom
The underwater cable loom comprises three cables and it is used to connected an accessory device (APG or hydrophone) to the Aquarius canister and also to activate the Burn-Wire.
A two-way Subconn connector provides power to the burn wire.
If fitted, a Burton eight-way connector is used to connect the APG sensor and it provides power and serial communication to the digital pressure sensor.
Alternatively and if fitted, a four-way Subconn connector provides signal and power connections to the hydrophone.
The eight-way Subconn Micro series connector is connected to the Aquarius canister.
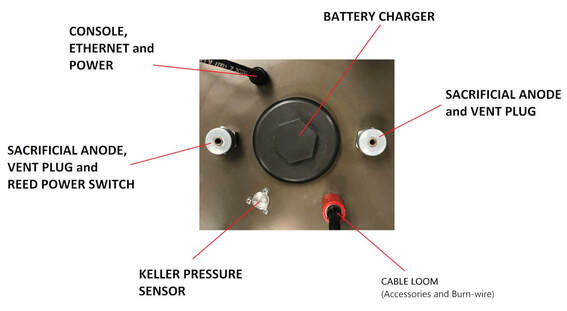
4.12 Connectors on the Aquarius canister
On the top half of the Aquarius canister the end user can identify the following parts:
Battery charger port: used to recharge the Lithium-ion batteries housed inside the canister before any deployment (see Section 12.3).
Cable Loom: used to power and communicate with the APG sensor or Hydrophone, and to activate the Burn-Wire (see Section 12.1).
Keller pressure sensor.
Console, Ethernet and Power connector: used to connect to the ULPD and LPC consoles, to access the LPC webpage and other functionalities via Ethernet and to eventually power up the system using an ROV compatible marine cable (see Section 12.2).
Sacrificial anode and vent plug.
Reed power switch: used to power off the system with an off plug during periods of storage and transport.
The system should be powered off using the off plug when it is not used to ensure the batteries are not drained while the unit is being transported or if the unit is put into storage for any length of time. The plug can also be used to reset the unit.
Note: The batteries can be charged when the off plug is inserted and the system powered off.
Note: The reed switch connector is located between the Keller pressure sensor and the Seacon connector the underwater cable loom.
4.13 Lifting frame
For deployment and recovery the Aquarius can be lifted using the stainless steel frame shown in the picture on the side.
The frame is attached to the top of four stainless steel rods. On the bottom side, the rods are attached to the flange of the Aquarius aluminium pressure canister.